Max Pooling Layer
In general, Pooling layers execute some kind of down-sample operations. The algorithm is the same as for average pool layer: a kernel of size k is slided over the images of the batch, and for every window a certain function is computed. In this case the output will be the maximum value between the pixel of the same window. In the animation below an example of the output
In case the combination of kernel size, stride and image dimension doesn’t allow all rows and columns to be in a window, the picture can be padded: this means that a certain number of rows/columns are added to every images in the batch. (nan values)
The output dimensions depend from the original image, kernel, stride and pad values, in particular:
And the output shape will be (batch, out_width, out_height, c ).
Usually, Pooling layers are used to avoid the problem of sensitiveness to features location: a downsample makes a CNN more robust to change in the features position in the image , referred as local transation invariance. Maxpooling summarizes the most activated presence of a feature.
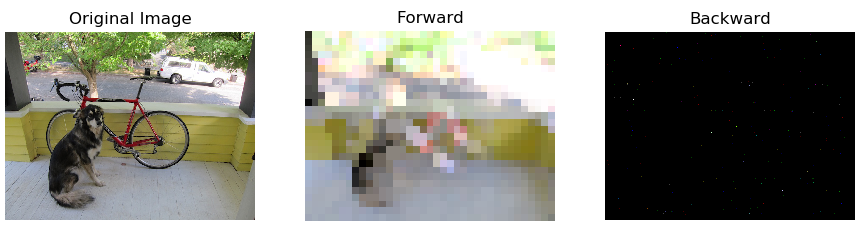
In the image below, we show some examples of the effect of differnet kernel (size, stride) on the input image.

In the example code below we show how to use the single layer:
from NumPyNet.layers.maxpool_layer import Maxpool_layer # class import
import numpy as np # the library is entirely based on numpy
batch, w, h, c = (5, 100, 100, 3) # you can also load an image from a file, but is import to have all 4 dimensions (batch, w, h, c)
input = np.random.uniform(low=0., high=1., size=(batch, w, h, c))
# Parameters definition
size = 3
stride = 2
pad = False
layer = Maxpool_layer(size=size, stride=stride, pad=pad)
# forward
layer.forward(inpt=input)
output = layer.output # of shape (batch, out_width, out_height, c)
# bacward
layer.delta = np.random.uniform(0, 1, size=output.shape) # it ideally comes from the next layer
delta = np.zeros(shape=input.shape)
layer.backward(delta=delta)
# now delta is updated and ready to be passed backward
To have a look more in details, here the defitions of forward and backward:
def forward(self, inpt):
'''
Forward function of the maxpool layer: It slides a kernel over every input image and return
the maximum value of every sub-window.
the function _asStride returns a view of the input arrary with shape
(batch, out_w, out_h , c, kx, ky), where, for every image in the batch we have:
out_w * out_h * c sub matrixes kx * ky, containing pixel values.
Parameters:
inpt : input images in the format (batch, input_w, input_h, input_c)
'''
self.batch, self.w, self.h, self.c = inpt.shape
kx , ky = self.size
st1, st2 = self.stride
if self.pad:
self._evaluate_padding()
mat_pad = self._pad(inpt)
else:
# If no padding, cut the last raws/columns in every image in the batch
mat_pad = inpt[:, : (self.w - kx) // st1*st1 + kx, : (self.h - ky) // st2*st2 + ky, ...]
# Return a strided view of the input array, shape: (batch, 1+(w-kx)//st1,1+(h-ky)//st2 ,c, kx, ky)
view = self._asStride(mat_pad, self.size, self.stride)
self.output = np.nanmax(view, axis=(4, 5)) # final shape (batch, out_w, out_h, c)
# New shape for view, to access the single sub matrix and retrieve couples of indexes
new_shape = (np.prod(view.shape[:-2]), view.shape[-2], view.shape[-1])
# Retrives a tuple of indexes (x,y) for every sub-matrix of the view array, that indicates
# where the maximum value is.
# In the loop I change the shape of view in order to have access to its last 2 dimension with r.
# r take the values of every sub matrix
self.indexes = [np.unravel_index(np.nanargmax(r), r.shape) for r in view.reshape(new_shape)]
self.indexes = np.asarray(self.indexes).T
self.delta = np.zeros(shape=self.out_shape, dtype=float)
The function forward is very similar to what has already been described for Average Pool Layers, the only differences are:
- After
viewis created, the function call fornumpy.nanmax, instead of averaging.nanmaxis able to avoid the nan padding - After that,
viewis reshaped to (batch * out_w * out_h * c, Kx, Ky): in that way, aforloop overview.reshape(new_shape)is able to acces every Kx * Ky matrix, that contains every window slided by the kernel. self.indexstores couples of indexes: those couples are thei,jposition of the max inside every window. So there will be batch * out_w * out_h * c couples.- the transposition is used in
backwardto retrieves the exact position of the maxima indeltaarray
def backward(self, delta):
'''
Backward function of maxpool layer: it access avery position where in the input image
there's a chosen maximum and add the correspondent self.delta value.
Since we work with a 'view' of delta, the same pixel may appear more than one time,
and an atomic acces to it's value is needed to correctly modifiy it.
Parameters:
delta : the global delta to be backpropagated with shape (batch, w, h, c)
'''
# Padding delta in order to create another view
if self.pad:
mat_pad = self._pad(delta)
else:
mat_pad = delta
# Create a view of net delta, following the padding true or false
net_delta_view = self._asStride(mat_pad, self.size, self.stride) #that is a view on mat_pad
# Create every possibile combination of index for the first four dimensions of
# a six dimensional array
b, w, h, c = self.output.shape
combo = itertools.product(range(b), range(w), range(h), range(c))
combo = np.asarray(list(combo)).T
# here I left the transposition, because of self.indexes
# those indexes are usefull to acces 'Atomically'(one at a time) every element in net_delta_view
# that needs to be modified
for b, i, j, k, x, y in zip(combo[0], combo[1], combo[2], combo[3], self.indexes[0], self.indexes[1]):
net_delta_view[b, i, j, k, x, y] += self.delta[b, i, j, k]
# Here delta is correctly modified
if self.pad:
_ , w_pad, h_pad, _ = mat_pad.shape
delta[:] = mat_pad[:, self.pad_top : w_pad-self.pad_bottom, self.pad_left : h_pad - self.pad_right, :]
else:
delta[:] = mat_pad
backward works the same as for the Average Pool Layers, the only difference is that self.delta is passed only for the pixels that have been chosen in forward as maxima.